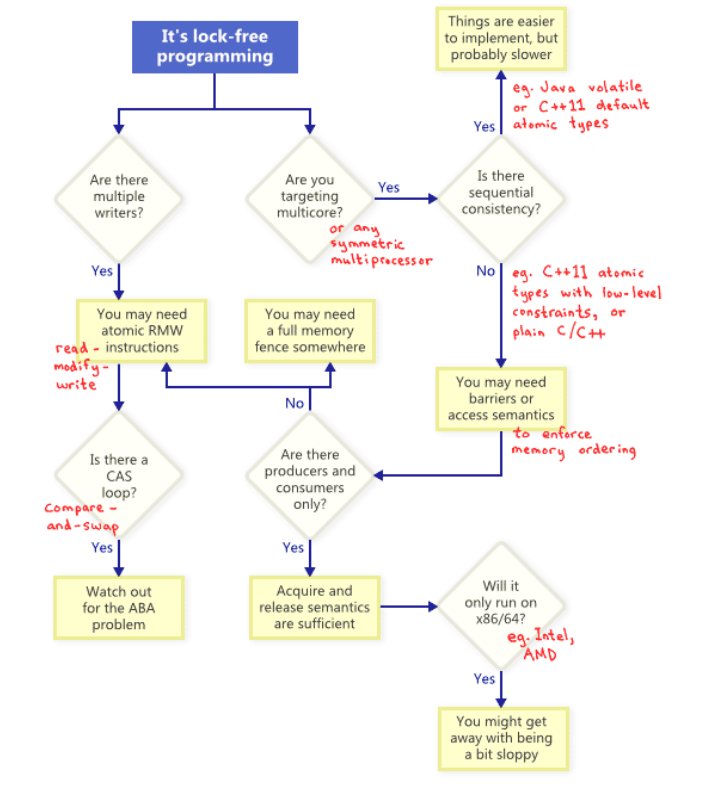
figure from : An Introduction to LockFree Programming
- Lock-free programming is hard, be sure you need it
- Never guess about performance
- Lock-free programming is mostly about memory order
- Know potential dangers of locks and how to avoid them
- Design lock-free data structures, not algorithm.
- Avoid writing generic lock-free code
- Minimize data sharing, know exactly what is shared
- Design in terms of atomic transactions
- Lock-free data structures usually need special interfaces
- Take every advantage of practical limitations
- Use DCLP to handle special cases
(from book: The Art of Multiprocessor Programming)
- Wait-free programs: each thread will complete its task in finite number of steps (finite amount of time) no matter what other threads are doing
— At all times, all threads make progress toward the final result - Lock-free programs: programs without locks (duh!); at least one thread makes progress no matter what other threads are doing
- Obstruction-free program: thread makes progress as long as no other thread accesses shared data at the same time
- Lock-based programs are not guaranteed to make progress toward the result in all cases
— In particular, consider what would happen if the thread holding the lock was suspended by the OS?
Problems With Locks
- (Not a problem) Locks are simpler than any alternative
— Most programs are not lock-free
— Know problems with locks not just to avoid locks but also to avoid - problems when using locks
- Deadlock
- Livelock
- Priority Inversion
- Convoying (lock in same order. Prevent dead lock)
- Reentrance and Signal safety
- Shared memory between processes
- Preemption tolerance
- Performance
- Performance of a well-written lock program may be no different from that of a lock-free program
- Lock-based program ≠ mutex-based program!
- Overhead of data sharing depends on the amount of data
- Mutexes have high overhead – a lot of shared data
- Spinlocks have one shared word
— Plus the shared data they protect - If a lock-free program needs to share several pieces of data to arrange lock-free synchronization, it may end up being slower than a program with spinlocks
Practical problems with locks
- In practice a lot of these problems may not matter
— I write HPC code, I don’t have priority threads, I just want the answer as fast as possible.
— Sure, the thread holding the lock can get suspended, but how often does it really happen?
— If a lock protects an atomic transaction with no user code inside, this cannot deadlock or livelock.
— I usually know what can and cannot be in shared memory - In practice, the main motivation to get rid of locks is performance
— Locks can make your program slow
— Lock-free does not always make it faster - In some special cases lock-free program may be simpler!
In practice, the main motivation to get rid of locks is performance
- Getting rid of locks does not automatically make the program faster
- How to atomically increment two 64-bit integers?
— Some CPUs have 128-bit CAS (DCAS)
— There is a really clever algorithm with CAS and a 3 rd integer
— Do it under a spinlock or use atomic exchange and busy-wait
— On a wide range of x86 systems, even under heavy congestion spinlock is faster than CAS for up to 40-64 cores and always faster than DCAS - The fastest is to not atomically increment two 64-bit integers
(and practical solutions)
- Wait-Free and Lock-Free programs do not suffer from deadlocks, livelocks, priority-inversion or convoying; they can be reentrant and signal-safe; they can support shared memory.
- Lock-Free and Wait-Free algorithms are usually very hard to write, understand, and maintain.
- minimize data sharing at the algorithm level.
- use spinlock (or equivalent) for accessing shared data.
- avoid designing lock-free algorithms, design lock-free data structures, it’s easier and usually is what you want.
- design only what you need, avoid generic designs
— Does not work if you are writing STL
Generic lock-free queue is very hard to write
- Problems:
— Another atomically incremented counter for “front”
— What to do when queue is empty
— What to do when queue runs out of memory - Generic lock-free queue is not always faster than a well-written non-thread-safe queue with a spinlock
Data Sharing is Expensive
- Non-thread-safe data access is faster than synchronized data access.
— Simplest case: non-atomic vs atomic access
— Avoids the unknown overhead of locking - Why is synchronized access more expensive?
- Cache coherency must be maintained in hardware.
- Side note: circuits for caches and their maintenance are the largest part of modern CPUs and the limiting factor in increasing the number of cores.
— Some CPU architectures give up on cache coherency altogether for that reason (Cell processor)
Performance myth:
Comparing general lock-free queue with spinlocked
wrapper around std::queue
- Results are inconsistent, varies a lot between CPU architectures (Haswell, Nehalem, Sandy Bridge) and machine configurations (number of CPUs, number of sockets)
- Results depend strongly on access patterns and congestion
- If there is a trend, it’s slightly in favor of std::queue (on the set of machines I have access to and set of access patterns tested)
- Subtle implementation details matter, such as having top and bottom pointers on separate cache lines
Special-case queues can be much faster :
- Maximum number of elements known in advance
- One producer thread, many consumer threads : 1P:NC
- One consumer thread, many producer threads: NP:1C
- Very different implementations but well worth it
Generic lock-free queue is very hard to write
- Problems:
— Another atomically incremented counter for “front”
— What to do when queue is empty
— What to do when queue runs out of memory - Generic lock-free queue is not always faster than a well-written non-thread-safe queue with a spinlock
- But a specialized lock-free queue often is!
(Exam the interface!)
- Each member function is thread-safe
- A thread-safe data structure can, at most, guarantee that each member function call is a transaction
— Whether lock-free or guarded by a lock - That transaction must be useful to the caller
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.